Loco-Manipulation for humanoid robots aims to enable robots to integrate
mobility with upper-body tracking capabilities. Most existing approaches adopt
hierarchical architectures that decompose control into isolated upper-body
(manipulation) and lower-body (locomotion) policies. While this decomposition
reduces training complexity, it inherently limits coordination between
subsystems and contradicts the unified whole-body control exhibited by humans.
We demonstrate that a single unified policy can achieve a combination of
tracking accuracy, large workspace, and robustness for humanoid
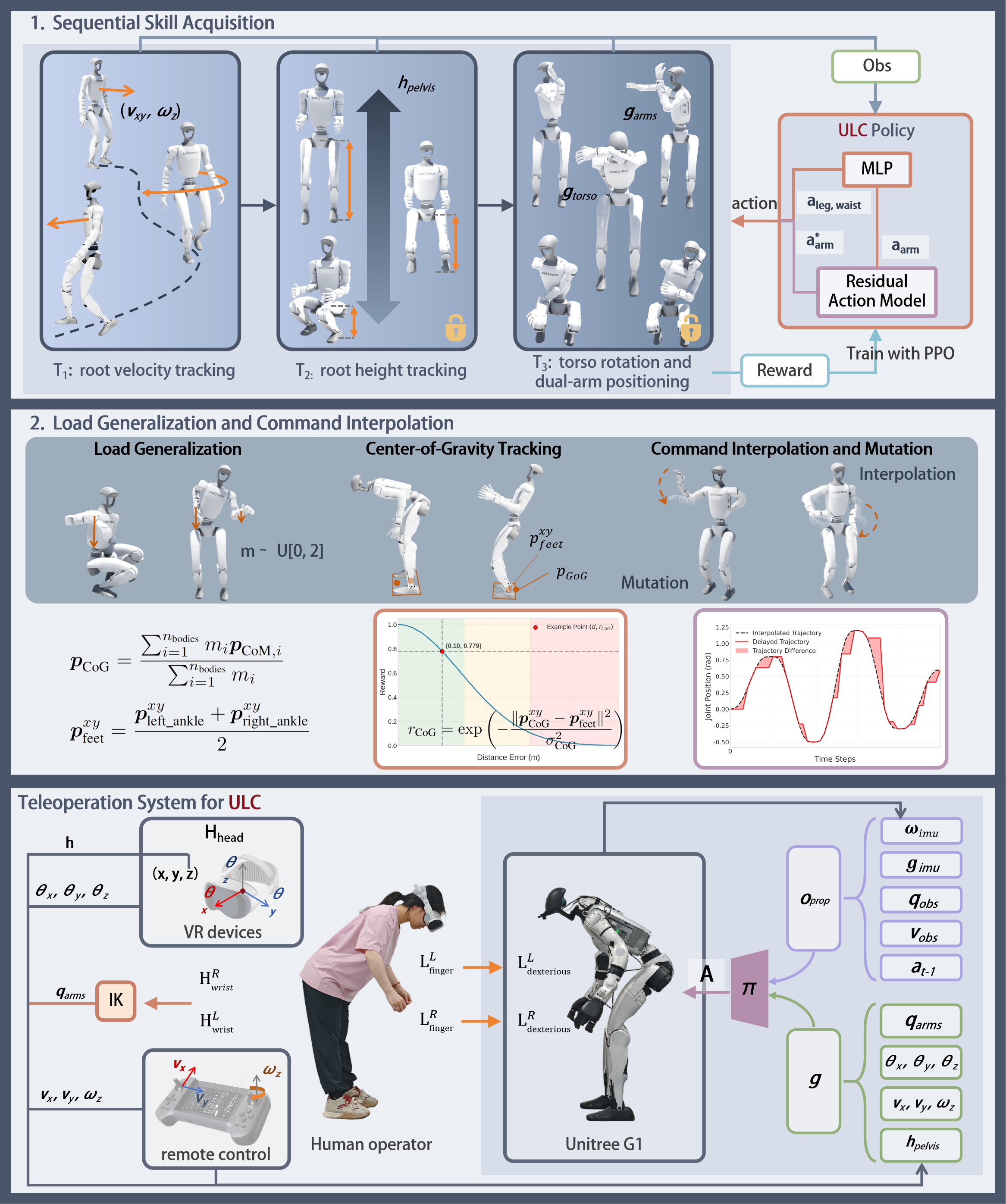
loco-manipulation. We propose the Unified
Loco-Manipulation
Controller
(ULC), a
single-policy framework that simultaneously tracks root velocity, root height,
torso rotation, and dual-arm joint positions in an end-to-end manner, proving
the feasibility of unified control without sacrificing performance. We achieve
this unified control through key technologies: sequence skill acquisition for
progressive learning complexity, residual action modeling for fine-grained
control adjustments, command polynomial interpolation for smooth motion
transitions, random delay release for robustness to deploy variations, load
randomization for generalization to external disturbances, and
center-of-gravity tracking for providing explicit policy gradients to maintain
stability.
We validate our method on the Unitree G1 humanoid robot with 3-DOF
(degrees-of-freedom) waist. Compared with strong baselines, ULC shows better
tracking performance to disentangled methods and demonstrating larger workspace
coverage. The unified dual-arm tracking enables precise manipulation under
external loads while maintaining coordinated whole-body control for complex
loco-manipulation tasks.